Welcome to OmniDrones’s documentation!#
OmniDrones is an open-source platform designed for reinforcement learning research on multi-rotor drone systems. Built on Nvidia Isaac Sim, OmniDrones features highly efficient and flxeible simulation that can be adopted for various research purposes.
Note
2023-9-25: The initial release of OmniDrones is developed based on Isaac Sim 2022.2.0. As the next version of Isaac Sim (2023.1.0) is expected to bring susbtantial changes but is not yet available, the APIs and usage of OmniDrones are subject to change. We will try our best to keep the documentation up-to-date.
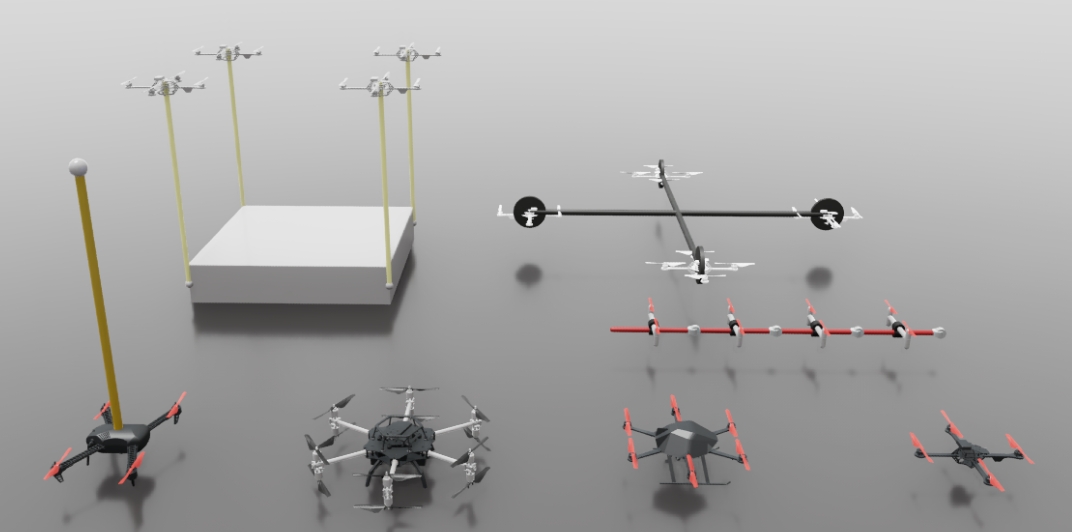
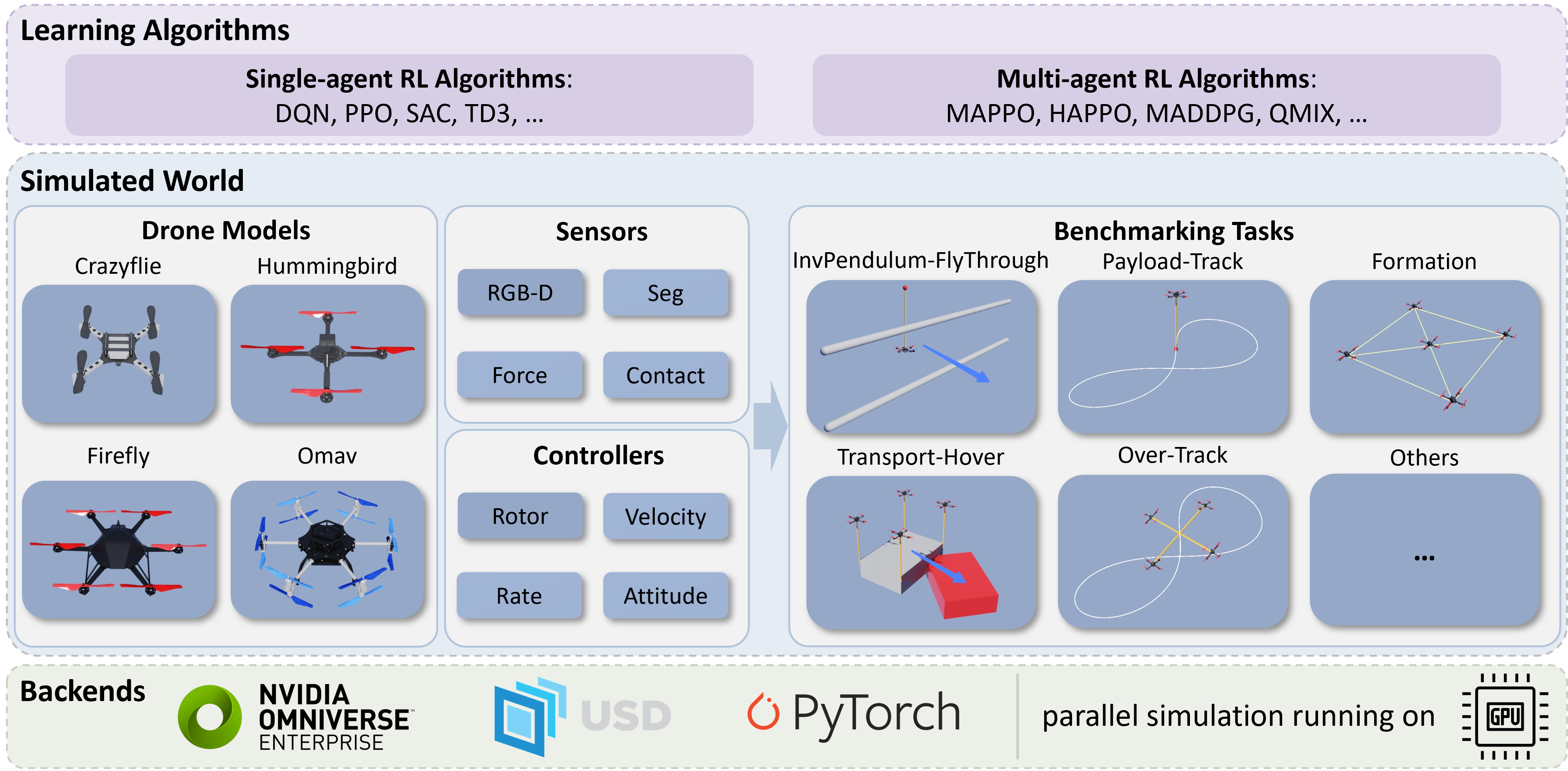
The platform, as released with our paper, currently focus on end-to-end learning of agile controllers for drones. It offers a suite of benchmark tasks and algorithm baselines to provide preliminary results for subsequent works.
An overview of the platform is shown below:
If you use OmniDrones in your research, please cite the paper with the following bibtex entry:
@misc{xu2023omnidrones,
title={OmniDrones: An Efficient and Flexible Platform for Reinforcement Learning in Drone Control},
author={Botian Xu and Feng Gao and Chao Yu and Ruize Zhang and Yi Wu and Yu Wang},
year={2023},
eprint={2309.12825},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Getting Started
Demos