Deployment on Crazyflie 2.1#
We deploy a tracking policy trained using OmniDrones to a Crazyflie 2.1 nanocopter. The policy is trained using the Track task and the domain randomization utilities.
We use crazyswarm2 to operate the drone.
The policy is trained with the action space transformed by a rate controller
(omni_drones.controllers.RateController). The trained policy is interfaced to
crazyswarm by converting the messages to and from tensor-based states. We show
results of tracking a 8-shaped lemniscate trajectory and a circle at a low speed.
Results#
Tracking Performance#
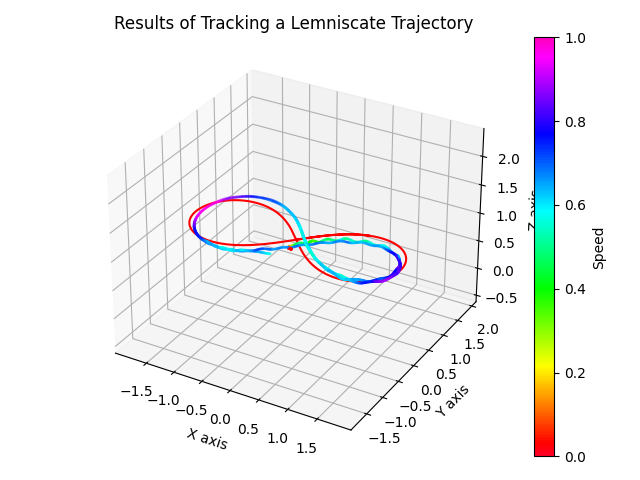
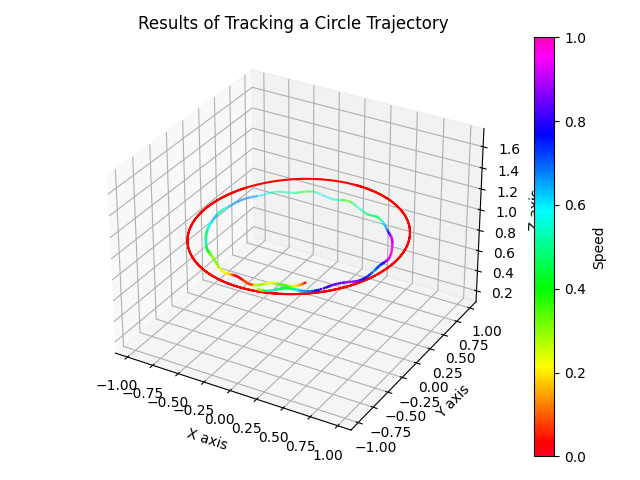
As shown in the figures and videos, the tracking performance is not optimal. This could be attributed to several factors, such as action noise, sensor errors, and ground effects, considering the small size of the Crazyflie 2.1. To enhance its performance, we are actively working on refining both the simulation and deployment pipeline. For example, we are incorporating more complex noise models for action and observation to better account for real-world conditions.
Quick Start#
python train.py headless=true eval_interval=200 task=TrackRand task.drone_model=crazyflie task.action_transform=rate