Controllers and Usage#
By default, the action space is such that the agent directly commands target thrusts of each rotor. However, we may sometimes want to use controllers that accepts higher-level commands, such as target velocities or attitudes.
We implement a few controllers in omni_drones/controllers following RotorS, including a position/velocity controller, an attitude controller, and a rate controller.
Using the Controllers#
Adding Controllers#
RL Performance#
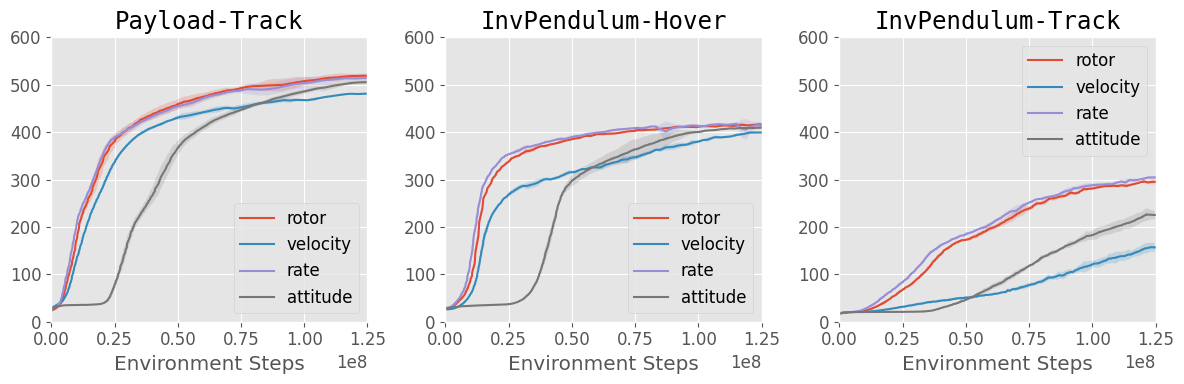
We argue that although controllers make the actions more meaningful, they may be suboptimal when used in RL training if we do not tune the parameters and shape the action space properly.
We provide some results of training with different controllers in three tasks with Hummingbird: